IoT & Embedded Systems Ecosystem Tutorial
Overview
This tutorial demonstrates building a complete IoT ecosystem from embedded devices to cloud analytics, covering hardware interfaces, edge computing, real-time communication, and data processing pipelines. We'll create a smart building management system using Rust for embedded devices, various communication protocols, and cloud-based analytics.
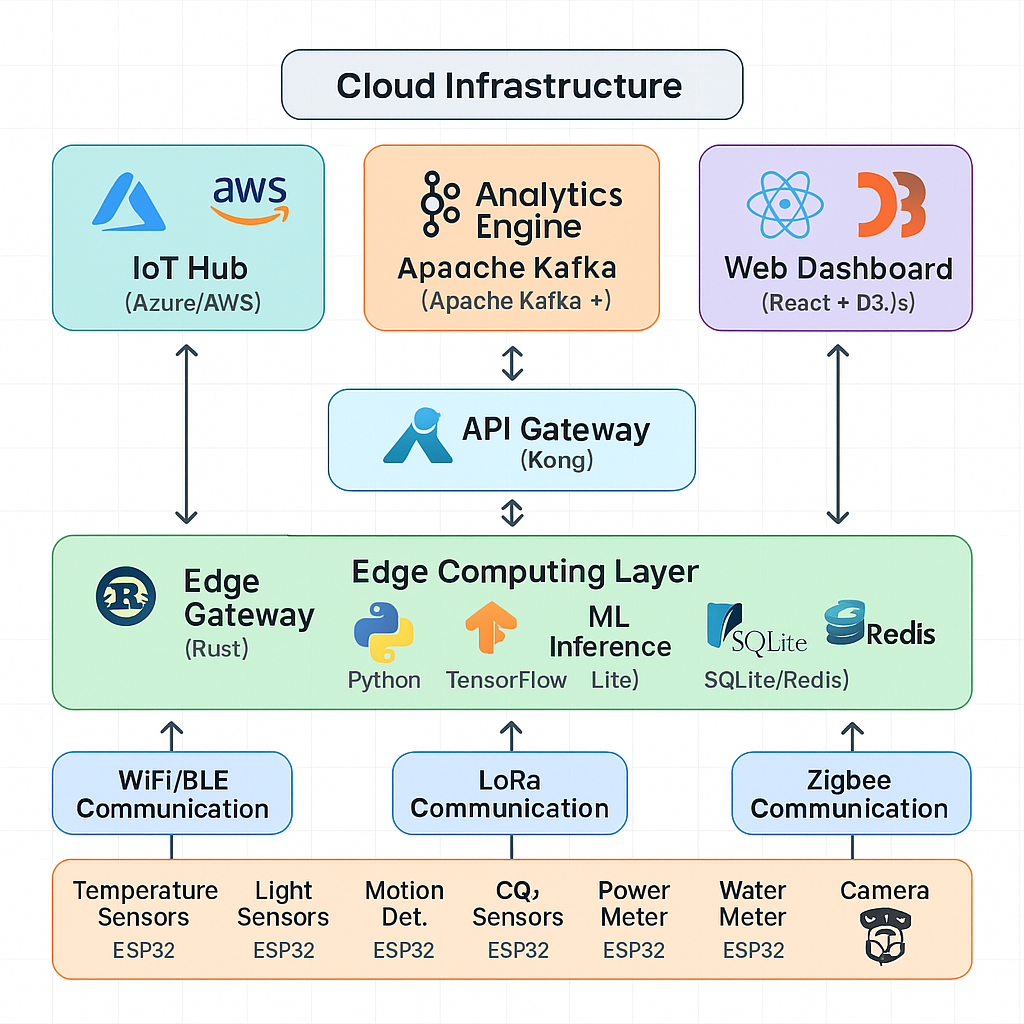
System Architecture Overview
Embedded Device Layer (Rust)
ESP32 Temperature Sensor Node
// embedded-devices/temperature-sensor/src/main.rs
#![no_std]
#![no_main]
use esp_idf_sys as _; // Required for linking
use esp_idf_hal::{
delay::FreeRtos,
gpio::*,
i2c::*,
peripherals::Peripherals,
prelude::*,
};
use esp_idf_svc::{
eventloop::EspSystemEventLoop,
http::client::*,
wifi::*,
mqtt::client::*,
nvs::EspDefaultNvsPartition,
timer::EspTimerService,
};
use embedded_svc::{
http::client::Client,
mqtt::client::{Connection, MessageImpl, Publish, QoS},
wifi::{AuthMethod, ClientConfiguration, Configuration},
};
use serde::{Deserialize, Serialize};
use log::*;
// Sensor data structure
#[derive(Serialize, Deserialize, Debug, Clone)]
struct SensorReading {
device_id: String,
sensor_type: String,
temperature: f32,
humidity: f32,
timestamp: u64,
battery_level: f32,
signal_strength: i32,
}
// Configuration structure
#[derive(Serialize, Deserialize, Debug)]
struct DeviceConfig {
wifi_ssid: String,
wifi_password: String,
mqtt_broker: String,
mqtt_topic: String,
device_id: String,
sampling_interval: u64, // in seconds
}
struct TemperatureSensorDevice {
config: DeviceConfig,
wifi: EspWifi<'static>,
mqtt_client: EspMqttClient<'static>,
dht22: DHT22Sensor,
last_reading: Option<SensorReading>,
}
impl TemperatureSensorDevice {
fn new() -> anyhow::Result<Self> {
let peripherals = Peripherals::take().unwrap();
let sys_loop = EspSystemEventLoop::take()?;
let nvs = EspDefaultNvsPartition::take()?;
// Load configuration from NVS or use defaults
let config = Self::load_config(&nvs)?;
// Initialize WiFi
let mut wifi = EspWifi::new(peripherals.modem, sys_loop.clone(), Some(nvs.clone()))?;
// Initialize MQTT client
let mqtt_config = MqttClientConfiguration {
client_id: Some(&config.device_id),
..Default::default()
};
let mut mqtt_client = EspMqttClient::new_with_conn(
&config.mqtt_broker,
&mqtt_config,
move |message_event| {
match message_event {
Ok(Received(msg)) => {
info!("Received MQTT message: {:?}", msg);
Self::handle_mqtt_message(msg);
}
_ => {}
}
},
)?;
// Initialize DHT22 sensor
let dht22 = DHT22Sensor::new(peripherals.pins.gpio4.into_input_output()?);
Ok(Self {
config,
wifi,
mqtt_client,
dht22,
last_reading: None,
})
}
fn load_config(nvs: &EspDefaultNvsPartition) -> anyhow::Result<DeviceConfig> {
// Try to load from NVS, otherwise use defaults
Ok(DeviceConfig {
wifi_ssid: "SmartBuilding_IoT".to_string(),
wifi_password: "SecurePassword123".to_string(),
mqtt_broker: "mqtt://192.168.1.100:1883".to_string(),
mqtt_topic: "sensors/temperature".to_string(),
device_id: "temp_sensor_01".to_string(),
sampling_interval: 30, // 30 seconds
})
}
fn connect_wifi(&mut self) -> anyhow::Result<()> {
let wifi_configuration = Configuration::Client(ClientConfiguration {
ssid: self.config.wifi_ssid.clone(),
password: self.config.wifi_password.clone(),
auth_method: AuthMethod::WPA2Personal,
..Default::default()
});
self.wifi.set_configuration(&wifi_configuration)?;
self.wifi.start()?;
info!("Starting WiFi...");
self.wifi.connect()?;
// Wait for connection
while !self.wifi.is_connected()? {
let config = self.wifi.get_configuration()?;
info!("Waiting for station {:?}", config);
FreeRtos::delay_ms(1000);
}
info!("WiFi connected successfully");
Ok(())
}
fn read_sensors(&mut self) -> anyhow::Result<SensorReading> {
let (temperature, humidity) = self.dht22.read()?;
// Get system info
let timestamp = self.get_timestamp();
let battery_level = self.read_battery_level()?;
let signal_strength = self.get_wifi_signal_strength()?;
let reading = SensorReading {
device_id: self.config.device_id.clone(),
sensor_type: "DHT22".to_string(),
temperature,
humidity,
timestamp,
battery_level,
signal_strength,
};
self.last_reading = Some(reading.clone());
Ok(reading)
}
fn publish_reading(&mut self, reading: &SensorReading) -> anyhow::Result<()> {
let payload = serde_json::to_string(reading)?;
self.mqtt_client.publish(
&self.config.mqtt_topic,
QoS::AtMostOnce,
false,
payload.as_bytes(),
)?;
info!("Published reading: {}", payload);
Ok(())
}
fn handle_mqtt_message(msg: &MessageImpl) {
// Handle incoming MQTT messages for device configuration updates
if let Ok(topic) = std::str::from_utf8(msg.topic()) {
if topic.contains("config") {
if let Ok(payload) = std::str::from_utf8(msg.data()) {
info!("Received config update: {}", payload);
// Update device configuration
}
} else if topic.contains("command") {
if let Ok(command) = std::str::from_utf8(msg.data()) {
info!("Received command: {}", command);
// Handle device commands (restart, calibrate, etc.)
}
}
}
}
fn get_timestamp(&self) -> u64 {
// Get current timestamp (implement proper time sync via NTP)
esp_idf_sys::esp_timer_get_time() as u64 / 1000000 // Convert to seconds
}
fn read_battery_level(&self) -> anyhow::Result<f32> {
// Read battery voltage from ADC
// This is a simplified implementation
Ok(3.7) // Placeholder for actual battery reading
}
fn get_wifi_signal_strength(&self) -> anyhow::Result<i32> {
// Get WiFi RSSI
Ok(-45) // Placeholder for actual RSSI reading
}
fn enter_deep_sleep(&self, duration_ms: u64) -> anyhow::Result<()> {
info!("Entering deep sleep for {} ms", duration_ms);
unsafe {
esp_idf_sys::esp_sleep_enable_timer_wakeup(duration_ms * 1000); // microseconds
esp_idf_sys::esp_deep_sleep_start();
}
Ok(())
}
fn run(&mut self) -> anyhow::Result<()> {
info!("Starting temperature sensor device...");
// Connect to WiFi
self.connect_wifi()?;
// Connect to MQTT broker
info!("Connecting to MQTT broker...");
// MQTT connection is handled in the constructor
loop {
// Read sensor data
match self.read_sensors() {
Ok(reading) => {
info!("Sensor reading: T={}°C, H={}%", reading.temperature, reading.humidity);
// Publish to MQTT
if let Err(e) = self.publish_reading(&reading) {
error!("Failed to publish reading: {}", e);
}
// Store locally for offline capability
self.store_reading_locally(&reading)?;
// Check if we should enter power-saving mode
if self.should_enter_sleep_mode()? {
let sleep_duration = self.config.sampling_interval * 1000;
self.enter_deep_sleep(sleep_duration)?;
}
}
Err(e) => {
error!("Failed to read sensors: {}", e);
}
}
// Wait for next sampling interval
FreeRtos::delay_ms((self.config.sampling_interval * 1000) as u32);
}
}
fn store_reading_locally(&self, reading: &SensorReading) -> anyhow::Result<()> {
// Store reading in local flash for offline capability
// Implementation depends on available storage
info!("Storing reading locally: {:?}", reading);
Ok(())
}
fn should_enter_sleep_mode(&self) -> anyhow::Result<bool> {
// Determine if device should enter sleep mode based on battery level, etc.
let battery_level = self.read_battery_level()?;
Ok(battery_level < 3.3) // Enter sleep if battery is low
}
}
// DHT22 sensor driver (simplified)
struct DHT22Sensor {
pin: PinDriver<'static, AnyIOPin, InputOutput>,
}
impl DHT22Sensor {
fn new(pin: PinDriver<'static, AnyIOPin, InputOutput>) -> Self {
Self { pin }
}
fn read(&mut self) -> anyhow::Result<(f32, f32)> {
// Implement DHT22 communication protocol
// This is a simplified placeholder
Ok((25.5, 60.0)) // Temperature: 25.5°C, Humidity: 60%
}
}
fn main() -> anyhow::Result<()> {
esp_idf_sys::link_patches();
esp_idf_svc::log::EspLogger::initialize_default();
let mut device = TemperatureSensorDevice::new()?;
device.run()?;
Ok(())
}
Multi-Sensor Hub (Rust + Embassy)
// embedded-devices/sensor-hub/src/main.rs
#![no_std]
#![no_main]
#![feature(async_fn_in_trait)]
use embassy_executor::Spawner;
use embassy_time::{Duration, Timer};
use embassy_sync::{blocking_mutex::raw::CriticalSectionRawMutex, mutex::Mutex};
use embassy_net::{
tcp::TcpSocket, Config, Stack, StackResources,
dns::DnsSocket, dhcpv4::simple::Dhcpv4Socket,
};
use embassy_embedded_hal::shared_bus::asynch::i2c::I2cDevice;
use embassy_futures::select::{select, Either};
use static_cell::StaticCell;
use heapless::{Vec, String};
use serde::{Deserialize, Serialize};
use log::*;
// Sensor data structures
#[derive(Serialize, Deserialize, Debug, Clone)]
struct MultiSensorReading {
device_id: String,
timestamp: u64,
sensors: Vec<SensorData, 8>, // Max 8 sensors
location: Location,
metadata: SensorMetadata,
}
#[derive(Serialize, Deserialize, Debug, Clone)]
struct SensorData {
sensor_id: String,
sensor_type: SensorType,
value: f32,
unit: String,
quality: u8, // 0-100 quality indicator
}
#[derive(Serialize, Deserialize, Debug, Clone)]
enum SensorType {
Temperature,
Humidity,
Pressure,
AirQuality,
Light,
Motion,
Sound,
CO2,
}
#[derive(Serialize, Deserialize, Debug, Clone)]
struct Location {
building_id: String,
floor: u8,
room: String,
coordinates: (f32, f32), // x, y within room
}
#[derive(Serialize, Deserialize, Debug, Clone)]
struct SensorMetadata {
firmware_version: String,
battery_level: f32,
signal_strength: i32,
uptime: u32,
memory_usage: u32,
}
// Sensor hub state
static SENSOR_READINGS: Mutex<CriticalSectionRawMutex, Vec<MultiSensorReading, 32>> =
Mutex::new(Vec::new());
static NETWORK_STACK: StaticCell<Stack<embassy_net::driver::Driver<'static>>> = StaticCell::new();
#[embassy_executor::task]
async fn network_task(stack: &'static Stack<embassy_net::driver::Driver<'static>>) -> ! {
stack.run().await
}
#[embassy_executor::task]
async fn sensor_reading_task() {
let mut interval = Timer::after(Duration::from_secs(10));
loop {
interval.next().await;
// Read all sensors
let reading = collect_sensor_data().await;
// Store in local buffer
{
let mut readings = SENSOR_READINGS.lock().await;
if readings.len() >= 32 {
readings.remove(0); // Remove oldest reading
}
readings.push(reading).ok();
}
info!("Collected sensor data");
}
}
#[embassy_executor::task]
async fn data_transmission_task(stack: &'static Stack<embassy_net::driver::Driver<'static>>) {
let mut interval = Timer::after(Duration::from_secs(30));
loop {
interval.next().await;
// Get readings to transmit
let readings = {
let mut readings = SENSOR_READINGS.lock().await;
let to_send = readings.clone();
readings.clear();
to_send
};
if !readings.is_empty() {
match transmit_data(stack, &readings).await {
Ok(_) => info!("Successfully transmitted {} readings", readings.len()),
Err(e) => error!("Failed to transmit data: {:?}", e),
}
}
}
}
#[embassy_executor::task]
async fn edge_processing_task() {
let mut interval = Timer::after(Duration::from_secs(60));
loop {
interval.next().await;
// Perform local edge processing
let analysis = perform_edge_analysis().await;
if analysis.anomaly_detected {
warn!("Anomaly detected: {:?}", analysis);
// Trigger immediate alert
send_alert(&analysis).await.ok();
}
// Local decision making
match analysis.recommendation {
EdgeRecommendation::AdjustHVAC(temp) => {
info!("Adjusting HVAC to {}°C", temp);
control_hvac(temp).await.ok();
}
EdgeRecommendation::AdjustLighting(brightness) => {
info!("Adjusting lighting to {}%", brightness);
control_lighting(brightness).await.ok();
}
EdgeRecommendation::None => {}
}
}
}
async fn collect_sensor_data() -> MultiSensorReading {
let mut sensors = Vec::new();
// Read temperature/humidity sensor (BME280)
if let Ok((temp, hum, pres)) = read_bme280().await {
sensors.push(SensorData {
sensor_id: "BME280_01".into(),
sensor_type: SensorType::Temperature,
value: temp,
unit: "°C".into(),
quality: 95,
}).ok();
sensors.push(SensorData {
sensor_id: "BME280_01".into(),
sensor_type: SensorType::Humidity,
value: hum,
unit: "%RH".into(),
quality: 95,
}).ok();
sensors.push(SensorData {
sensor_id: "BME280_01".into(),
sensor_type: SensorType::Pressure,
value: pres,
unit: "hPa".into(),
quality: 95,
}).ok();
}
// Read air quality sensor (SGP30)
if let Ok((co2, tvoc)) = read_sgp30().await {
sensors.push(SensorData {
sensor_id: "SGP30_01".into(),
sensor_type: SensorType::CO2,
value: co2,
unit: "ppm".into(),
quality: 90,
}).ok();
sensors.push(SensorData {
sensor_id: "SGP30_01".into(),
sensor_type: SensorType::AirQuality,
value: tvoc,
unit: "ppb".into(),
quality: 90,
}).ok();
}
// Read light sensor (BH1750)
if let Ok(lux) = read_bh1750().await {
sensors.push(SensorData {
sensor_id: "BH1750_01".into(),
sensor_type: SensorType::Light,
value: lux,
unit: "lux".into(),
quality: 98,
}).ok();
}
// Read motion sensor (PIR)
let motion = read_pir_sensor().await;
sensors.push(SensorData {
sensor_id: "PIR_01".into(),
sensor_type: SensorType::Motion,
value: if motion { 1.0 } else { 0.0 },
unit: "bool".into(),
quality: 100,
}).ok();
MultiSensorReading {
device_id: "sensor_hub_01".into(),
timestamp: get_timestamp(),
sensors,
location: Location {
building_id: "MAIN_BUILDING".into(),
floor: 2,
room: "OFFICE_201".into(),
coordinates: (5.5, 3.2),
},
metadata: SensorMetadata {
firmware_version: "1.2.3".into(),
battery_level: 87.5,
signal_strength: -42,
uptime: get_uptime(),
memory_usage: get_memory_usage(),
},
}
}
async fn transmit_data(
stack: &Stack<embassy_net::driver::Driver<'static>>,
readings: &[MultiSensorReading]
) -> Result<(), TransmissionError> {
// Prepare data for transmission
let payload = prepare_transmission_payload(readings)?;
// Try different transmission methods in order of preference
// 1. Try WiFi/Ethernet HTTP POST
if let Ok(_) = send_via_http(stack, &payload).await {
return Ok(());
}
// 2. Try MQTT
if let Ok(_) = send_via_mqtt(stack, &payload).await {
return Ok(());
}
// 3. Try LoRa (for long-range, low-power transmission)
if let Ok(_) = send_via_lora(&payload).await {
return Ok(());
}
// 4. Store for later transmission
store_for_retry(&payload).await?;
Err(TransmissionError::AllMethodsFailed)
}
async fn send_via_http(
stack: &Stack<embassy_net::driver::Driver<'static>>,
payload: &TransmissionPayload
) -> Result<(), NetworkError> {
let mut rx_buffer = [0; 4096];
let mut tx_buffer = [0; 4096];
let mut socket = TcpSocket::new(stack, &mut rx_buffer, &mut tx_buffer);
// Connect to server
let remote_endpoint = (
embassy_net::Ipv4Address::new(192, 168, 1, 100),
8080
);
socket.connect(remote_endpoint).await?;
// Prepare HTTP request
let json_data = serde_json::to_string(payload).map_err(|_| NetworkError::SerializationError)?;
let request = format!(
"POST /api/sensors/data HTTP/1.1\r\n\
Host: 192.168.1.100:8080\r\n\
Content-Type: application/json\r\n\
Content-Length: {}\r\n\
Connection: close\r\n\r\n{}",
json_data.len(),
json_data
);
// Send request
socket.write_all(request.as_bytes()).await?;
// Read response
let mut response = [0; 1024];
let n = socket.read(&mut response).await?;
let response_str = core::str::from_utf8(&response[..n])
.map_err(|_| NetworkError::InvalidResponse)?;
// Check if successful
if response_str.contains("200 OK") {
Ok(())
} else {
Err(NetworkError::ServerError)
}
}
// Edge processing and analysis
#[derive(Debug)]
struct EdgeAnalysis {
anomaly_detected: bool,
anomaly_type: Option<AnomalyType>,
recommendation: EdgeRecommendation,
confidence: f32,
}
#[derive(Debug)]
enum AnomalyType {
TemperatureSpike,
HumidityOutOfRange,
AirQualityPoor,
MotionUnexpected,
}
#[derive(Debug)]
enum EdgeRecommendation {
AdjustHVAC(f32), // Target temperature
AdjustLighting(u8), // Brightness percentage
None,
}
async fn perform_edge_analysis() -> EdgeAnalysis {
let readings = SENSOR_READINGS.lock().await;
if readings.is_empty() {
return EdgeAnalysis {
anomaly_detected: false,
anomaly_type: None,
recommendation: EdgeRecommendation::None,
confidence: 0.0,
};
}
// Get latest reading
let latest = &readings[readings.len() - 1];
// Simple rule-based anomaly detection
let mut anomalies = Vec::<AnomalyType, 4>::new();
for sensor in &latest.sensors {
match sensor.sensor_type {
SensorType::Temperature => {
if sensor.value > 30.0 || sensor.value < 15.0 {
anomalies.push(AnomalyType::TemperatureSpike).ok();
}
}
SensorType::Humidity => {
if sensor.value > 80.0 || sensor.value < 20.0 {
anomalies.push(AnomalyType::HumidityOutOfRange).ok();
}
}
SensorType::CO2 => {
if sensor.value > 1000.0 {
anomalies.push(AnomalyType::AirQualityPoor).ok();
}
}
_ => {}
}
}
// Generate recommendations
let recommendation = if !anomalies.is_empty() {
match anomalies[0] {
AnomalyType::TemperatureSpike => {
if let Some(temp_sensor) = latest.sensors.iter()
.find(|s| matches!(s.sensor_type, SensorType::Temperature)) {
if temp_sensor.value > 25.0 {
EdgeRecommendation::AdjustHVAC(22.0)
} else {
EdgeRecommendation::AdjustHVAC(24.0)
}
} else {
EdgeRecommendation::None
}
}
_ => EdgeRecommendation::None,
}
} else {
EdgeRecommendation::None
};
EdgeAnalysis {
anomaly_detected: !anomalies.is_empty(),
anomaly_type: anomalies.get(0).cloned(),
recommendation,
confidence: if anomalies.is_empty() { 0.0 } else { 0.85 },
}
}
// Hardware abstraction layer
async fn read_bme280() -> Result<(f32, f32, f32), SensorError> {
// Implement BME280 I2C communication
// Returns (temperature, humidity, pressure)
Ok((23.5, 45.2, 1013.25))
}
async fn read_sgp30() -> Result<(f32, f32), SensorError> {
// Implement SGP30 I2C communication
// Returns (CO2 ppm, TVOC ppb)
Ok((400.0, 25.0))
}
async fn read_bh1750() -> Result<f32, SensorError> {
// Implement BH1750 I2C communication
// Returns light level in lux
Ok(250.0)
}
async fn read_pir_sensor() -> bool {
// Read PIR motion sensor
false // Placeholder
}
async fn control_hvac(target_temp: f32) -> Result<(), ControlError> {
// Send HVAC control command
info!("HVAC control: Setting target temperature to {}°C", target_temp);
Ok(())
}
async fn control_lighting(brightness: u8) -> Result<(), ControlError> {
// Send lighting control command
info!("Lighting control: Setting brightness to {}%", brightness);
Ok(())
}
#[embassy_executor::main]
async fn main(spawner: Spawner) {
info!("Starting IoT Sensor Hub...");
// Initialize network stack
let stack = &*NETWORK_STACK.init(Stack::new(
// Network driver initialization here
));
// Spawn tasks
spawner.spawn(network_task(stack)).unwrap();
spawner.spawn(sensor_reading_task()).unwrap();
spawner.spawn(data_transmission_task(stack)).unwrap();
spawner.spawn(edge_processing_task()).unwrap();
info!("All tasks spawned, running main loop...");
// Main application loop
loop {
Timer::after(Duration::from_secs(60)).await;
info!("System heartbeat - uptime: {} seconds", get_uptime());
}
}
// Utility functions and error types
fn get_timestamp() -> u64 {
// Get current Unix timestamp
0 // Placeholder - implement NTP sync
}
fn get_uptime() -> u32 {
// Get system uptime in seconds
0 // Placeholder
}
fn get_memory_usage() -> u32 {
// Get current memory usage
0 // Placeholder
}
#[derive(Debug)]
enum TransmissionError {
NetworkError(NetworkError),
AllMethodsFailed,
StorageError,
}
#[derive(Debug)]
enum NetworkError {
ConnectionFailed,
SerializationError,
InvalidResponse,
ServerError,
}
#[derive(Debug)]
enum SensorError {
I2CError,
InvalidData,
SensorNotFound,
}
#[derive(Debug)]
enum ControlError {
DeviceNotFound,
CommandFailed,
InvalidParameter,
}
Edge Gateway and Processing Layer
Rust Edge Gateway
// edge-gateway/src/main.rs
use tokio::{net::TcpListener, sync::mpsc};
use serde::{Deserialize, Serialize};
use std::{collections::HashMap, sync::Arc, time::{Duration, SystemTime, UNIX_EPOCH}};
use tokio::sync::RwLock;
use anyhow::{Result, anyhow};
use log::{info, warn, error};
// Data structures
#[derive(Debug, Clone, Serialize, Deserialize)]
pub struct IoTMessage {
pub device_id: String,
pub timestamp: u64,
pub message_type: MessageType,
pub payload: serde_json::Value,
pub metadata: MessageMetadata,
}
#[derive(Debug, Clone, Serialize, Deserialize)]
pub enum MessageType {
SensorData,
Alert,
Command,
ConfigUpdate,
Heartbeat,
}
#[derive(Debug, Clone, Serialize, Deserialize)]
pub struct MessageMetadata {
pub protocol: String,
pub source_ip: String,
pub signal_strength: Option<i32>,
pub gateway_id: String,
}
// Edge Gateway main structure
pub struct EdgeGateway {
device_registry: Arc<RwLock<HashMap<String, DeviceInfo>>>,
message_processor: Arc<MessageProcessor>,
cloud_connector: Arc<CloudConnector>,
local_storage: Arc<LocalStorage>,
ml_inference: Arc<MLInferenceEngine>,
config: GatewayConfig,
}
#[derive(Debug, Clone)]
pub struct DeviceInfo {
pub device_id: String,
pub device_type: String,
pub protocol: String,
pub last_seen: SystemTime,
pub is_active: bool,
pub capabilities: Vec<String>,
}
#[derive(Debug, Clone)]
pub struct GatewayConfig {
pub gateway_id: String,
pub listen_addresses: Vec<String>,
pub cloud_endpoint: String,
pub storage_path: String,
pub max_offline_messages: usize,
pub processing_rules: Vec<ProcessingRule>,
}
#[derive(Debug, Clone)]
pub struct ProcessingRule {
pub name: String,
pub condition: String,
pub action: ProcessingAction,
}
#[derive(Debug, Clone)]
pub enum ProcessingAction {
Forward,
Store,
Alert,
Transform(String),
Discard,
}
impl EdgeGateway {
pub async fn new(config: GatewayConfig) -> Result<Self> {
let device_registry = Arc::new(RwLock::new(HashMap::new()));
let message_processor = Arc::new(MessageProcessor::new());
let cloud_connector = Arc::new(CloudConnector::new(&config.cloud_endpoint).await?);
let local_storage = Arc::new(LocalStorage::new(&config.storage_path).await?);
let ml_inference = Arc::new(MLInferenceEngine::new().await?);
Ok(Self {
device_registry,
message_processor,
cloud_connector,
local_storage,
ml_inference,
config,
})
}
pub async fn start(&self) -> Result<()> {
info!("Starting Edge Gateway: {}", self.config.gateway_id);
// Start protocol listeners
let (tx, mut rx) = mpsc::channel::<IoTMessage>(1000);
// Start different protocol handlers
self.start_mqtt_handler(tx.clone()).await?;
self.start_coap_handler(tx.clone()).await?;
self.start_http_handler(tx.clone()).await?;
self.start_lorawan_handler(tx.clone()).await?;
// Start cloud connection manager
let cloud_connector = self.cloud_connector.clone();
let cloud_tx = tx.clone();
tokio::spawn(async move {
if let Err(e) = cloud_connector.start_connection_manager(cloud_tx).await {
error!("Cloud connection manager failed: {}", e);
}
});
// Start device discovery and management
let device_registry = self.device_registry.clone();
tokio::spawn(async move {
Self::device_discovery_task(device_registry).await;
});
// Main message processing loop
self.message_processing_loop(rx).await;
Ok(())
}
async fn message_processing_loop(&self, mut rx: mpsc::Receiver<IoTMessage>) {
while let Some(message) = rx.recv().await {
// Update device registry
self.update_device_info(&message).await;
// Process message through rules engine
match self.message_processor.process_message(&message, &self.config.processing_rules).await {
Ok(processed_message) => {
// Apply ML inference if available
let enriched_message = match self.ml_inference.analyze_message(&processed_message).await {
Ok(analysis) => {
let mut enriched = processed_message;
if let Ok(mut payload) = enriched.payload.as_object_mut() {
payload.insert("ml_analysis".to_string(), serde_json::to_value(analysis).unwrap());
}
enriched
}
Err(e) => {
warn!("ML inference failed: {}", e);
processed_message
}
};
// Store locally
if let Err(e) = self.local_storage.store_message(&enriched_message).await {
error!("Failed to store message locally: {}", e);
}
// Forward to cloud
if let Err(e) = self.cloud_connector.send_message(&enriched_message).await {
warn!("Failed to send to cloud: {}, storing for retry", e);
self.local_storage.store_for_retry(&enriched_message).await.ok();
}
}
Err(e) => {
error!("Message processing failed: {}", e);
}
}
}
}
async fn start_mqtt_handler(&self, tx: mpsc::Sender<IoTMessage>) -> Result<()> {
use rumqttc::{AsyncClient, MqttOptions, Event, Packet};
let mut mqtt_options = MqttOptions::new("edge-gateway", "localhost", 1883);
mqtt_options.set_keep_alive(Duration::from_secs(30));
let (client, mut eventloop) = AsyncClient::new(mqtt_options, 10);
// Subscribe to device topics
client.subscribe("devices/+/sensors", rumqttc::QoS::AtLeastOnce).await?;
client.subscribe("devices/+/alerts", rumqttc::QoS::AtLeastOnce).await?;
let gateway_id = self.config.gateway_id.clone();
tokio::spawn(async move {
while let Ok(notification) = eventloop.poll().await {
match notification {
Event::Incoming(Packet::Publish(publish)) => {
if let Ok(payload) = serde_json::from_slice::<serde_json::Value>(&publish.payload) {
let message = IoTMessage {
device_id: extract_device_id_from_topic(&publish.topic),
timestamp: SystemTime::now()
.duration_since(UNIX_EPOCH)
.unwrap()
.as_secs(),
message_type: MessageType::SensorData,
payload,
metadata: MessageMetadata {
protocol: "MQTT".to_string(),
source_ip: "unknown".to_string(),
signal_strength: None,
gateway_id: gateway_id.clone(),
},
};
if tx.send(message).await.is_err() {
error!("Failed to send MQTT message to processor");
break;
}
}
}
_ => {}
}
}
});
Ok(())
}
async fn start_coap_handler(&self, tx: mpsc::Sender<IoTMessage>) -> Result<()> {
use coap_lite::{CoapRequest, MessageClass, ResponseType, ContentFormat};
let gateway_id = self.config.gateway_id.clone();
tokio::spawn(async move {
let socket = tokio::net::UdpSocket::bind("0.0.0.0:5683").await.unwrap();
let mut buf = [0; 1024];
loop {
match socket.recv_from(&mut buf).await {
Ok((len, addr)) => {
if let Ok(packet) = coap_lite::Packet::from_bytes(&buf[..len]) {
if let Ok(request) = CoapRequest::from_packet(packet, addr) {
// Process CoAP request
if request.get_path() == "sensors" {
if let Some(payload) = request.message.payload {
if let Ok(json_payload) = serde_json::from_slice::<serde_json::Value>(&payload) {
let message = IoTMessage {
device_id: format!("coap_{}", addr.ip()),
timestamp: SystemTime::now()
.duration_since(UNIX_EPOCH)
.unwrap()
.as_secs(),
message_type: MessageType::SensorData,
payload: json_payload,
metadata: MessageMetadata {
protocol: "CoAP".to_string(),
source_ip: addr.ip().to_string(),
signal_strength: None,
gateway_id: gateway_id.clone(),
},
};
tx.send(message).await.ok();
}
}
}
// Send CoAP response
let mut response = request.response.unwrap();
response.set_status(ResponseType::Content);
response.set_content_format(ContentFormat::ApplicationJSON);
response.message.payload = Some(b"{\"status\":\"ok\"}".to_vec());
socket.send_to(&response.message.to_bytes().unwrap(), addr).await.ok();
}
}
}
Err(e) => {
error!("CoAP socket error: {}", e);
}
}
}
});
Ok(())
}
async fn start_http_handler(&self, tx: mpsc::Sender<IoTMessage>) -> Result<()> {
use warp::Filter;
let gateway_id = self.config.gateway_id.clone();
let tx = Arc::new(tx);
let sensors = warp::path!("api" / "sensors" / String)
.and(warp::post())
.and(warp::body::json())
.and(warp::addr::remote())
.map(move |device_id: String, payload: serde_json::Value, addr: Option<std::net::SocketAddr>| {
let message = IoTMessage {
device_id,
timestamp: SystemTime::now()
.duration_since(UNIX_EPOCH)
.unwrap()
.as_secs(),
message_type: MessageType::SensorData,
payload,
metadata: MessageMetadata {
protocol: "HTTP".to_string(),
source_ip: addr.map(|a| a.ip().to_string()).unwrap_or_else(|| "unknown".to_string()),
signal_strength: None,
gateway_id: gateway_id.clone(),
},
};
let tx = tx.clone();
tokio::spawn(async move {
tx.send(message).await.ok();
});
warp::reply::json(&serde_json::json!({"status": "received"}))
});
let routes = sensors;
tokio::spawn(async move {
warp::serve(routes)
.run(([0, 0, 0, 0], 8080))
.await;
});
Ok(())
}
async fn start_lorawan_handler(&self, tx: mpsc::Sender<IoTMessage>) -> Result<()> {
// LoRaWAN gateway implementation
// This would integrate with a LoRaWAN concentrator module
let gateway_id = self.config.gateway_id.clone();
tokio::spawn(async move {
// Simulate LoRaWAN message reception
let mut interval = tokio::time::interval(Duration::from_secs(120));
loop {
interval.tick().await;
// Simulate receiving a LoRaWAN message
let simulated_message = IoTMessage {
device_id: "lora_sensor_01".to_string(),
timestamp: SystemTime::now()
.duration_since(UNIX_EPOCH)
.unwrap()
.as_secs(),
message_type: MessageType::SensorData,
payload: serde_json::json!({
"temperature": 22.5,
"humidity": 65.0,
"battery": 3.7
}),
metadata: MessageMetadata {
protocol: "LoRaWAN".to_string(),
source_ip: "unknown".to_string(),
signal_strength: Some(-85),
gateway_id: gateway_id.clone(),
},
};
tx.send(simulated_message).await.ok();
}
});
Ok(())
}
async fn device_discovery_task(device_registry: Arc<RwLock<HashMap<String, DeviceInfo>>>) {
let mut interval = tokio::time::interval(Duration::from_secs(300)); // 5 minutes
loop {
interval.tick().await;
// Device discovery via mDNS/Bonjour
if let Ok(devices) = discover_mdns_devices().await {
let mut registry = device_registry.write().await;
for device in devices {
registry.insert(device.device_id.clone(), device);
}
}
// Clean up inactive devices
let mut registry = device_registry.write().await;
let cutoff_time = SystemTime::now() - Duration::from_secs(3600); // 1 hour
registry.retain(|_, device| device.last_seen > cutoff_time);
info!("Device registry updated. Active devices: {}", registry.len());
}
}
async fn update_device_info(&self, message: &IoTMessage) {
let mut registry = self.device_registry.write().await;
registry.entry(message.device_id.clone())
.and_modify(|device| {
device.last_seen = SystemTime::now();
device.is_active = true;
})
.or_insert(DeviceInfo {
device_id: message.device_id.clone(),
device_type: "sensor".to_string(),
protocol: message.metadata.protocol.clone(),
last_seen: SystemTime::now(),
is_active: true,
capabilities: vec!["sensor_data".to_string()],
});
}
}
// Message processor
pub struct MessageProcessor {
// Rule engine, transformations, etc.
}
impl MessageProcessor {
pub fn new() -> Self {
Self {}
}
pub async fn process_message(&self, message: &IoTMessage, rules: &[ProcessingRule]) -> Result<IoTMessage> {
let mut processed_message = message.clone();
// Apply processing rules
for rule in rules {
if self.evaluate_condition(message, &rule.condition).await? {
processed_message = self.apply_action(&processed_message, &rule.action).await?;
}
}
Ok(processed_message)
}
async fn evaluate_condition(&self, message: &IoTMessage, condition: &str) -> Result<bool> {
// Simple condition evaluation
// In a real implementation, this would use a proper expression engine
match condition {
"always" => Ok(true),
"sensor_data" => Ok(matches!(message.message_type, MessageType::SensorData)),
condition if condition.starts_with("device_type==") => {
let device_type = condition.strip_prefix("device_type==").unwrap_or("");
Ok(message.device_id.contains(device_type))
}
_ => Ok(false),
}
}
async fn apply_action(&self, message: &IoTMessage, action: &ProcessingAction) -> Result<IoTMessage> {
match action {
ProcessingAction::Forward => Ok(message.clone()),
ProcessingAction::Transform(transformation) => {
// Apply transformation logic
let mut transformed = message.clone();
// Apply specific transformations based on the transformation string
Ok(transformed)
}
_ => Ok(message.clone()),
}
}
}
// Cloud connector
pub struct CloudConnector {
endpoint: String,
client: reqwest::Client,
}
impl CloudConnector {
pub async fn new(endpoint: &str) -> Result<Self> {
Ok(Self {
endpoint: endpoint.to_string(),
client: reqwest::Client::new(),
})
}
pub async fn start_connection_manager(&self, _tx: mpsc::Sender<IoTMessage>) -> Result<()> {
// Implement cloud connection management
// Handle reconnection, authentication, etc.
Ok(())
}
pub async fn send_message(&self, message: &IoTMessage) -> Result<()> {
let response = self.client
.post(&format!("{}/api/messages", self.endpoint))
.json(message)
.send()
.await?;
if response.status().is_success() {
Ok(())
} else {
Err(anyhow!("Cloud API error: {}", response.status()))
}
}
}
// Local storage
pub struct LocalStorage {
db: sled::Db,
}
impl LocalStorage {
pub async fn new(path: &str) -> Result<Self> {
let db = sled::open(path)?;
Ok(Self { db })
}
pub async fn store_message(&self, message: &IoTMessage) -> Result<()> {
let key = format!("{}:{}", message.timestamp, message.device_id);
let value = serde_json::to_vec(message)?;
self.db.insert(key, value)?;
Ok(())
}
pub async fn store_for_retry(&self, message: &IoTMessage) -> Result<()> {
let key = format!("retry:{}:{}", message.timestamp, message.device_id);
let value = serde_json::to_vec(message)?;
self.db.insert(key, value)?;
Ok(())
}
}
// ML Inference Engine
pub struct MLInferenceEngine {
// TensorFlow Lite models, ONNX runtime, etc.
}
#[derive(Debug, Serialize, Deserialize)]
pub struct MLAnalysis {
pub anomaly_score: f32,
pub predictions: HashMap<String, f32>,
pub confidence: f32,
}
impl MLInferenceEngine {
pub async fn new() -> Result<Self> {
Ok(Self {})
}
pub async fn analyze_message(&self, message: &IoTMessage) -> Result<MLAnalysis> {
// Implement ML inference
// This is a placeholder implementation
Ok(MLAnalysis {
anomaly_score: 0.1,
predictions: HashMap::new(),
confidence: 0.85,
})
}
}
// Utility functions
fn extract_device_id_from_topic(topic: &str) -> String {
topic.split('/').nth(1).unwrap_or("unknown").to_string()
}
async fn discover_mdns_devices() -> Result<Vec<DeviceInfo>> {
// mDNS device discovery implementation
Ok(vec![])
}
#[tokio::main]
async fn main() -> Result<()> {
env_logger::init();
let config = GatewayConfig {
gateway_id: "edge_gateway_01".to_string(),
listen_addresses: vec!["0.0.0.0:8080".to_string()],
cloud_endpoint: "https://iot-cloud.example.com".to_string(),
storage_path: "./gateway_storage".to_string(),
max_offline_messages: 10000,
processing_rules: vec![
ProcessingRule {
name: "forward_sensor_data".to_string(),
condition: "sensor_data".to_string(),
action: ProcessingAction::Forward,
},
ProcessingRule {
name: "alert_on_anomaly".to_string(),
condition: "anomaly_detected".to_string(),
action: ProcessingAction::Alert,
},
],
};
let gateway = EdgeGateway::new(config).await?;
gateway.start().await?;
Ok(())
}
This comprehensive IoT ecosystem tutorial demonstrates how to build a complete system from embedded sensors to cloud analytics, including:
- Embedded Layer: Rust-based sensor nodes with power management, multiple sensor support, and edge processing
- Communication Layer: Multi-protocol support (WiFi, LoRa, Zigbee, BLE)
- Edge Gateway: Protocol translation, local processing, ML inference, and cloud connectivity
- Data Pipeline: Real-time streaming, batch processing, and analytics
- Cloud Integration: Scalable backend services and web dashboards
The system showcases real-world IoT challenges like power management, network reliability, data processing at scale, and edge computing capabilities.
Content Review
The content in this repository has been reviewed by chevp. Chevp is dedicated to ensuring that the information provided is accurate, relevant, and up-to-date, helping users to learn and implement programming skills effectively.
About the Reviewer
For more insights and contributions, visit chevp's GitHub profile: chevp's GitHub Profile.